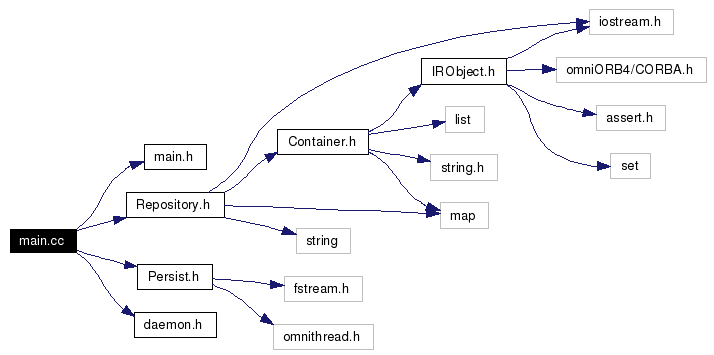
#include "main.h"#include "Repository.h"#include "Persist.h"#include "daemon.h"Include dependency graph for main.cc:
Go to the source code of this file.
Functions | |
| omni_semaphore | shutdownSemaphore (0) |
| int | main (int argc, char *argv[]) |
| void | Omniifr_Orb_shutdown (int signum) |
| Signal handler, sets Orb::_shutdownRequested. | |
| void | Omniifr_Orb_bumpTraceLevel (int signum) |
| Signal handler, each call to this method 'bumps' up the trace level by 5, modulo 45. | |
| void | Omniifr_Ifr_checkpoint (int signum) |
| Signal handler, forces a checkpoint (saves IFR state to file). | |
Variables | |
| CORBA::ORB_var | orb |
| The global ORB. | |
| bool | readonly = false |
| Is the IFR to be readonly - set by options(). | |
| Omniifr::Persist * | persist = NULL |
| int | checkpointPeriodSec = 900 |
| How often to checkpoint - set by options(). | |
|
||||||||||||
|
Definition at line 95 of file main.cc. References checkpointPeriodSec, Omniifr::daemon, Omniifr::Daemon::daemonize(), DB, IFELSE_OMNIORB4, Omniifr::Repository_impl::inst(), Omniifr_Ifr_checkpoint(), Omniifr_Orb_bumpTraceLevel(), Omniifr_Orb_shutdown(), orb, persist, readonly, Omniifr::Daemon::runningOk(), and shutdownSemaphore(). 00096 {
00097 Omniifr::Daemon daemon(argc,argv);
00098
00099 const char* action=""; // Use this variable to help report errors.
00100 try
00101 {
00102 action="initialising ORB";
00103 orb=CORBA::ORB_init(argc,argv);
00104
00105 action="constructing Persist";
00106 persist =new Omniifr::Persist(readonly? 0: checkpointPeriodSec);
00107
00108 #ifdef HAVE_GETOPT
00109 action="processing command line options";
00110 options(argc,argv,daemon,*persist);
00111 #endif
00112
00113 action="daemonizing";
00114 daemon.daemonize();
00115
00116
00117 action="initialising Repository";
00118 Omniifr::Repository_impl::inst().init( orb.in(), readonly, persist );
00119 if(readonly)
00120 {
00121 action="destroying Persist";
00122 delete persist;
00123 persist=NULL;
00124 }
00125
00126 #ifdef HAVE_SIGNAL_H
00127 SIGSET(SIGINT , ::Omniifr_Orb_shutdown);
00128 SIGSET(SIGTERM, ::Omniifr_Orb_shutdown);
00129 # ifdef SIGUSR1
00130 SIGSET(SIGUSR1, ::Omniifr_Orb_bumpTraceLevel);
00131 # endif
00132 # ifdef SIGUSR2
00133 SIGSET(SIGUSR2, ::Omniifr_Ifr_checkpoint);
00134 # endif
00135 # ifdef SIGPIPE
00136 SIGSET(SIGPIPE, SIG_IGN); // Ignore broken pipes
00137 # endif
00138 #endif
00139
00140 action="closing parent process";
00141 daemon.runningOk();
00142
00143 // Park the main thread.
00144 // Do this by waiting on a semaphore rather than calling ORB_run() -
00145 // this makes it safe for a signal to wake us up.
00146 action="running ORB";
00147 cout<<action<<'.'<<endl;
00148 shutdownSemaphore.wait();
00149
00150 // SIGTERM or whatever has triggered shutdown.
00151 DB(1,"Shutdown requested.")
00152 action="shutting down ORB";
00153 orb->shutdown(1); // Synchronous shutdown
00154 action="destroying ORB";
00155 orb->destroy(); // clean up
00156 if(persist)
00157 {
00158 action="destroying Persist";
00159 delete persist;
00160 }
00161 return 0;
00162
00163 }
00164 catch(CORBA::SystemException& ex)
00165 {
00166 cerr<<"Failed while "<<action<<"."
00167 IFELSE_OMNIORB4(" "<<ex._name()<<" ("<<ex.NP_minorString()<<")",) <<endl;
00168 }
00169 catch(CORBA::Exception& ex)
00170 {
00171 cerr<<"Failed while "<<action<<"." IFELSE_OMNIORB4(" "<<ex._name(),) <<endl;
00172 }
00173 return 1;
00174 }
|
|
|
Signal handler, forces a checkpoint (saves IFR state to file).
Definition at line 194 of file main.cc. References Omniifr::Persist::checkpoint(), DB, persist, and readonly. Referenced by main(). 00195 {
00196 if(readonly)
00197 {
00198 DB(1,"Checkpoint request ignored: Interface Repository is read only.")
00199 }
00200 else
00201 {
00202 DB(1,"Checkpoint requested.")
00203 assert(persist!=NULL);
00204 persist->checkpoint();
00205 }
00206 }
|
|
|
Signal handler, each call to this method 'bumps' up the trace level by 5, modulo 45.
Definition at line 188 of file main.cc. References DB. Referenced by main(). 00189 {
00190 omniORB::traceLevel=(omniORB::traceLevel+5)%45;
00191 DB(0,"TRACE LEVEL BUMPED TO "<<omniORB::traceLevel<<" BY SIGNAL "<<signum)
00192 }
|
|
|
Signal handler, sets Orb::_shutdownRequested. The parameter is ignored. This method may be used as a signal handler. Definition at line 182 of file main.cc. References shutdownSemaphore(). Referenced by main(). 00183 {
00184 // Wake up the main thread.
00185 shutdownSemaphore.post();
00186 }
|
|
|
Referenced by main(), and Omniifr_Orb_shutdown(). |
|
|
How often to checkpoint - set by options().
Definition at line 45 of file main.cc. Referenced by main(). |
|
|
The global ORB.
Definition at line 42 of file main.cc. Referenced by Omniifr::Repository_impl::init(), and main(). |
|
|
Definition at line 44 of file main.cc. Referenced by Omniifr::Repository_impl::init(), main(), Omniifr_Ifr_checkpoint(), and Omniifr::Persist::WriteLock::WriteLock(). |
|
|
Is the IFR to be readonly - set by options().
Definition at line 43 of file main.cc. Referenced by Omniifr::Repository_impl::init(), main(), and Omniifr_Ifr_checkpoint(). |
 1.4.1
1.4.1